歡迎訪(fǎng)問法他克自動化設備官方網站!
|
搜(sōu)索
|


工業(yè)機(jī)器人
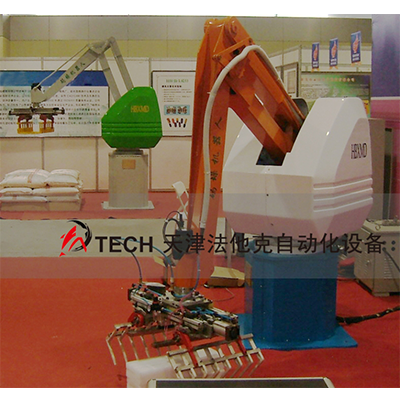
工(gōng)業機器人
該(gāi)機器人采用仿生學(xué)原理仿造人類(lèi)手臂動作,依(yī)靠伺服係統實現手臂的自由運動,完成(chéng)搬運(yùn)動作(zuò),可實現對各種箱、袋、瓶的搬運及碼垛(duǒ)。
該機器人采用仿生學原理仿造人類手臂動作,依靠伺服(fú)係統實現手臂的自由(yóu)運動(dòng),完成搬運動作,可實現對各種箱、袋、瓶的(de)搬運及碼垛。依靠plc和伺服電機控製實現位置和軌跡的準(zhǔn)確控製,自動完成搬(bān)運堆碼等動(dòng)作。設備整體采用連杆設計(jì)原(yuán)理,所以設備剛度更強(qiáng)運行速度(dù)更快。
機器人的動作示教簡單:機器人采(cǎi)用“圓柱(zhù)坐標”定位方式,機器人的動作可在觸摸屏上設定坐標點參數也可手動移動到目標點,點擊“坐標輸入按(àn)鈕”機(jī)器人可自動保存手動運動(dòng)軌跡的坐標點,坐標參(cān)數保存後機器人可自動按照設定(dìng)好(hǎo)的參數運動執行(háng)搬碼動(dòng)作。
手抓回轉半徑900~2500
手抓回轉角度330°
手抓高度範圍(wéi)2300~
最高工(gōng)作能力(lì):袋裝碼垛800袋/小時
最大搬運重量:80KG

